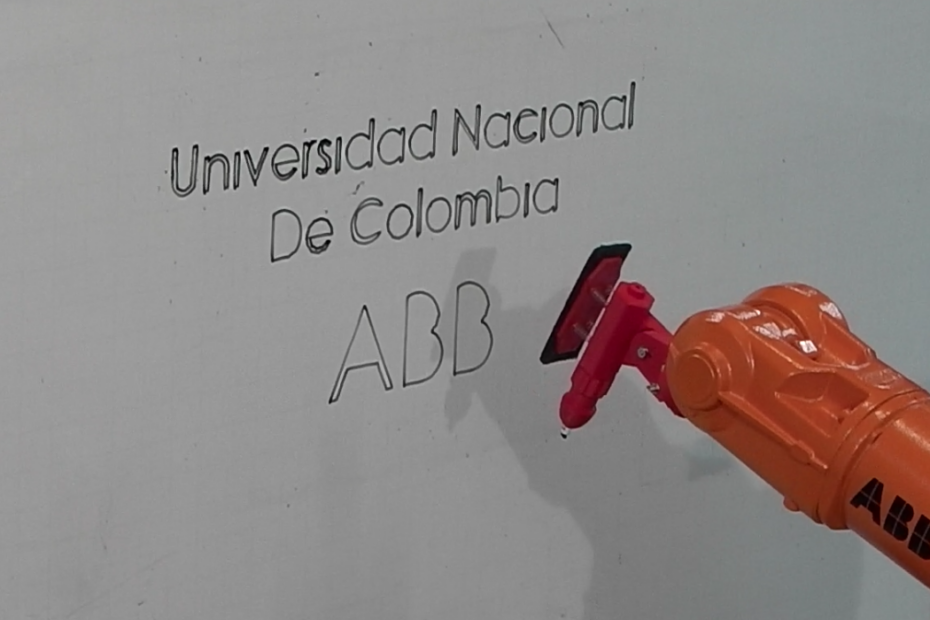
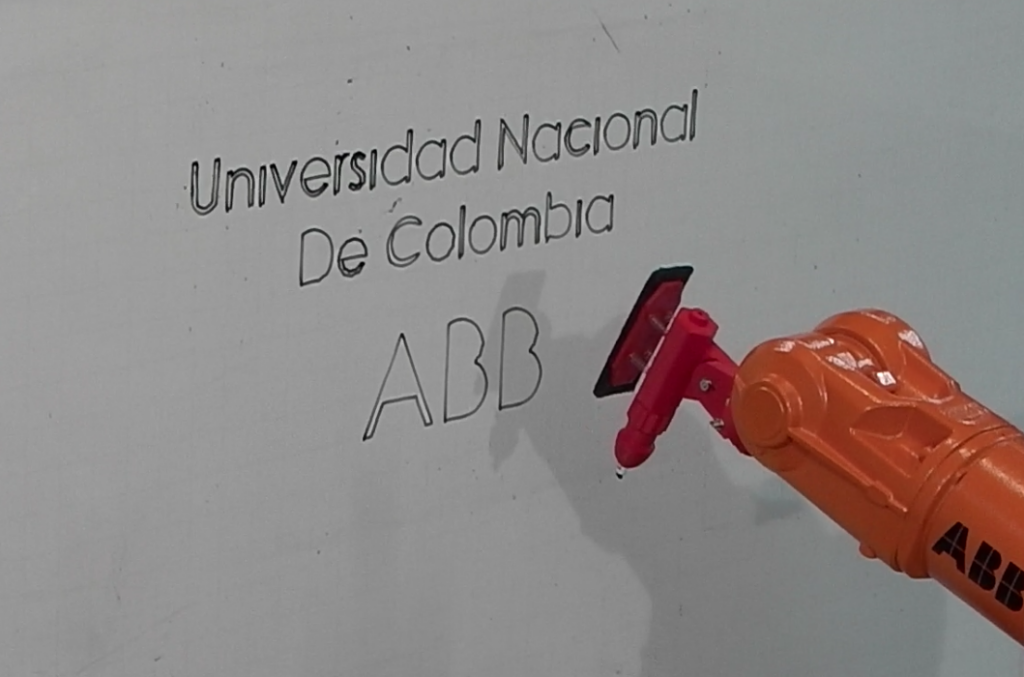
This industrial robot tool uses an assembly of printed parts, springs and a common marker to paint on any surface with the precision expected on a industrial robot tool.
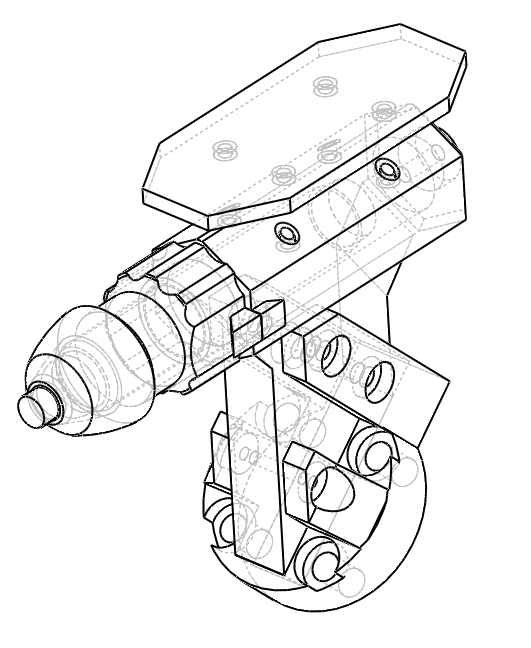
The body uses common whiteboard marker (about 20 mm in diameter or less) and requires a spring to ensure that the point of the marker sticks out of the tool, this gives the tool a constant contact force and good drawn paths.
The eraser plate uses common pen springs (retractable pens), one on each round slot, use acetone or any strong glue to permanently attach the springs to the eraser plate and then to the body.
Add any cloth or foam material to the eraser plate to ensure good cleaning over the board. The springs on the eraser plate give a constant friction force between the surface and the cleaning material.
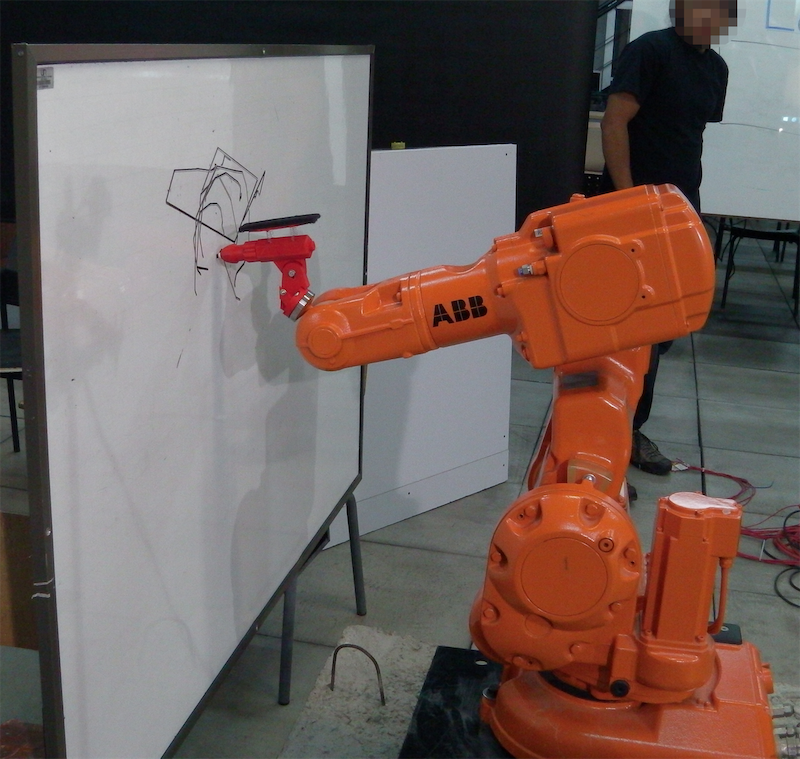
Designed and tested on a IRB-140 ABB Industrial Robot at Universidad Nacional de Colombia – Bogota